Vamos a
conectar la pantalla LCD WD-C1603P a Arduino Due
Lo primero es conectar los pines:
LCD - Vss - Pin 1 : GND
LCD - Vdd - Pin 2 : VCC
LCD - V0 - Pin 3 : Resistencia Variable (1K)
Con esto podemos comprobar si la pantalla enciende y
quedaría así:

Nota: si no vemos la pantalla en negro debemos aumentar o
disminuir la resistencia variable hasta que lleguemos al contraste deseado.

Ahora que sabemos que la pantalla enciende le enviaremos
datos.
Debemos hacer las conexiones siguientes:
LCD – Vss – Pin 1 : GND
LCD – Vdd – Pin 2 : VCC
LCD – V0 – Pin 3 : Resistencia Variable (1K)
LCD – RS – Pin 4 : Arduino Pin 2
LCD – RW – Pin 5 : GND
LCD – E – Pin 6 : Arduino Pin 4
LCD – D4 – Pin 11 : Arduino Pin 6
LCD – D5 – Pin 12 : Arduino Pin 7
LCD – D6 – Pin 13 : Arduino Pin 8
LCD – D7 – Pin 14 : Arduino Pin 9
Imagen ilustrativa de conexiones (aunque la imagen de la
pantalla no es la misma sirve para el ejemplo):

Cargamos el pingüino el con código siguiente:
#include <LiquidCrystal.h>
#define RS 2
#define E 4
#define D4 6
#define D5 7
#define D6 8
#define D7 9
LiquidCrystal lcd(RS, E, D4, D5, D6 , D7);
void setup() {
lcd.begin(16,4);
//dimensiones de la pantalla
lcd.clear();
//posicionar el cursor
lcd.setCursor(0,1);
//escribir
lcd.write("LCD
WD-C1603P");
lcd.setCursor(0,2);
lcd.write("3
LINEAS");
lcd.setCursor(0,3);
lcd.write("Con
Arduino");
}
void loop() { }
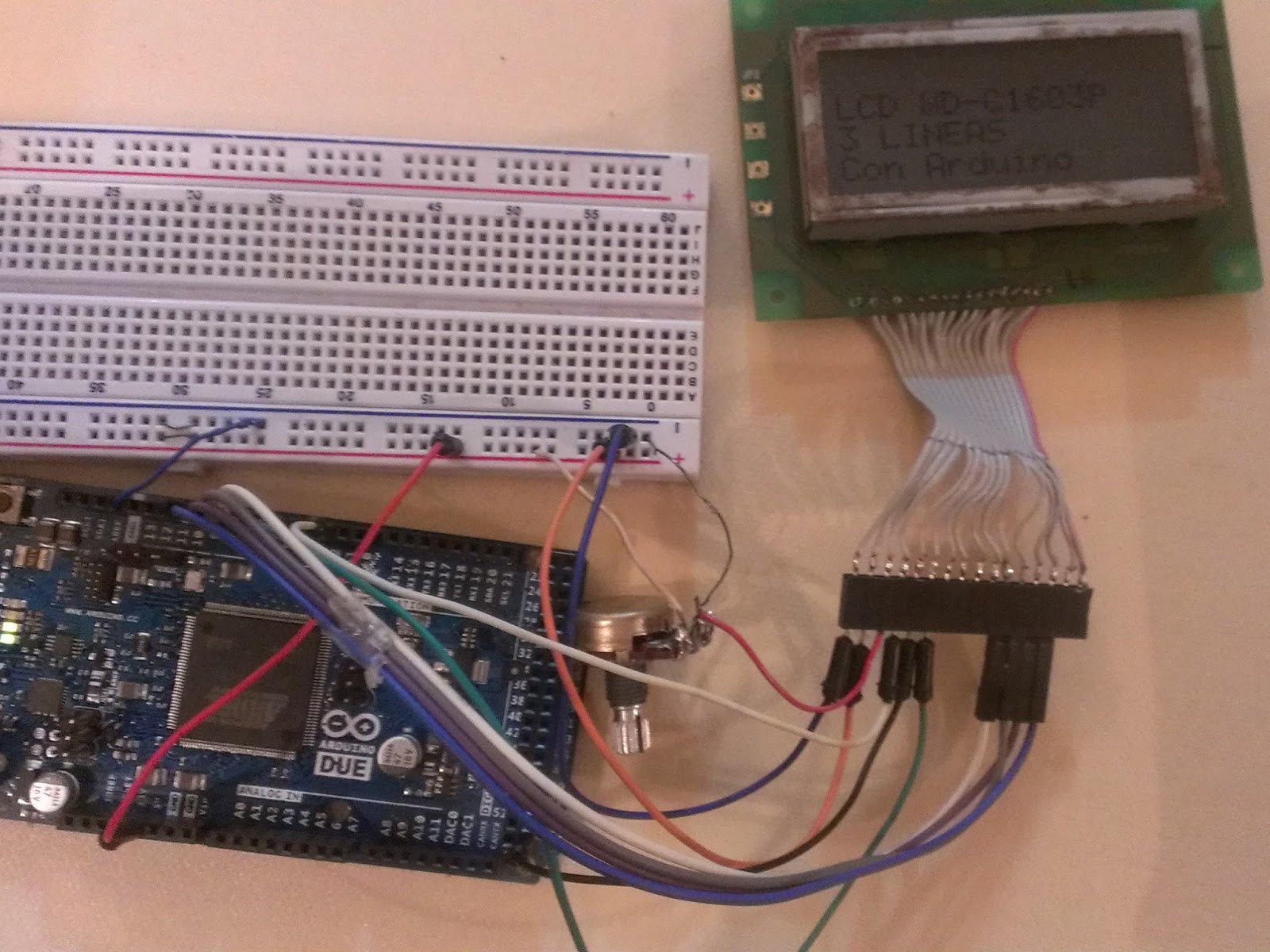
Y finalmente la pantalla nos mostrara lo que escribimos:

Aún no he logrado controlar los iconos de la primera línea
(mensaje, batería…) si alguien lo logra por favor me informa.
Saludos y éxitos con sus experimentos.









